

Künstliche Intelligenz (KI)
Deep Learning, Reinforcement Learning | Tensorflow, Tensorboard, neuronale Netzwerke
Überblick über meine Berufserfahrung.
Vollzeitbeschäftigter im Automotive-Bereich von Bertrandt. Teilhabe an Projekten im Bereich autonomes Fahren.
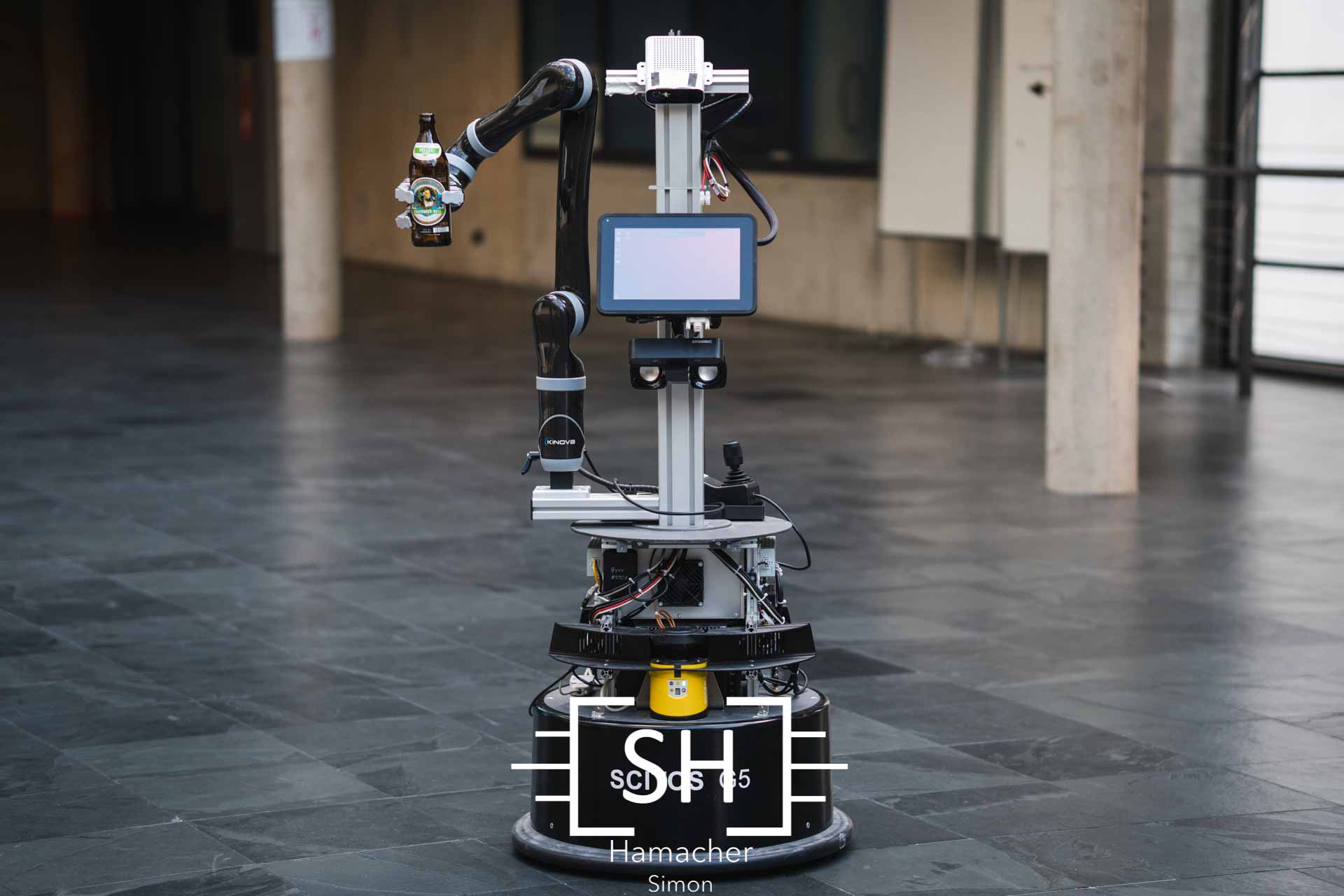
Die Masterarbeit befasst sich mit dem Greifen und Versetzen von Objekten durch einen Haushalts-Hilfs-Roboter des Labors für Autonome Systeme der Hochschule München. Dieser Roboter besteht aus der fahrbaren Plattform Scitos G5 der Firma MetraLabs sowie einem Greifarm des Typs j2n6s300 von der Firma Kinova, der über die üblichen sechs Freiheitsgrade derartiger Greifarme verfügt. Ziel dieser Masterarbeit ist, dass durch Einsatz der im Roboter verbauten Sensoren wie z.B. einer Tiefenbild-Kamera der Roboter ein Objekt erkennt, präzise ergreift und an einem vorgegebenen Zielpunkt unversehrt abstellt. Gesteuert wird der Roboter mit dem ROS Roboter-Betriebssystem. — Weiterlesen…
Mein zweites Masterprojekt bestand aus Entwicklung und Bau eines Brachiographen, einem kostengünstigen tragbaren DIN A5-Stiftplotter. Ausgehend von einem Foto, aufgenommen mit einem normalen Android-Mobiltelefon, überträgt meine Android-App dieses Bild zur Konturerkennung und zum Plotten über WLAN oder Bluetooth auf den Raspberry Pi des Brachiographen. Bestandteile dieses Projekts waren u.a. die Entwicklung der Android-App einschließlich der verschiedenen Kommunikationswege, die Programmierung eines Raspberry PIs in Python, die Erstellung der bidirektionalen GUI-Anwendung für den daran angeschlossenen Touchscreen in PyQt und schließlich die Ansteuerung des dedizierten 12-Kanal-PWM-Chips zur präzisen drei-dimensionalen Positionierung des Plotarms. — Weiterlesen…
Der Aufsatz fasste den Benchmark unseres eigenen Modells mit dem kommerziellen Simulationsprogramm URSim zusammen. Unser in Python implementiertes Modell umfasste sowohl “lineare im Gelenkraum”-Trajektorien als auch “lineare im Posenraum”-Trajektorien.
Mein erstes Masterprojekt befasste sich mit der Verbesserung des vom Labor für Autonome Systeme der Hochschule München zur Verfügung gestellten Versuchsroboters (Clearpath Husky). Diese Verbesserungen beinhalteten die Erweiterung des 3D-Modells sowie das Hinzufügung einer neuen IMU, welche bessere Berechnungen der Odometrie ermöglicht.
Die Bachelorarbeit befasst sich mit der theoretischen und praktischen Anwendung einer Methode des Reinforcement-Learnings. Reinforcement Learning ist ein wichtiger Teil des maschinellen Lernens. Die Arbeit zeigt, wie diese Methoden sinnvoll appliziert werden können, um durch künstliche Intelligenz einen Roboterarm sicher zum Ziel zu bewegen. Die Arbeit wurde im Labor für autonome Systeme der Hochschule München durchgeführt.
Systemintegration und Fahrzeugtests im Forschungs- und Innovationszentrum von BMW in München — Aktualisierung von Komponenten und Firmware von statischen und dynamischen Testfahrzeugen — Testplanung einschließlich Vorbereitung und Nachbearbeitung der Testergebnisse — Implementierung und Anpassung der Messtechnik an die Versuchsfahrzeuge (Entwicklung von individuellen Adaptern etc.).
Automotive in-vehicle Netzwerk-Transceiver – Simulation und Messung komplexer CAN-Netzwerktopologien mit Oszilloskop- und Spice-Simulatoren unter Verwendung spezifischer VHDL-Module. Entwicklung einer tragbaren Hochspannungsquelle für eine bessere EMV-Zertifizierung.
Abschluss - Abitur - Nymphenburger Schulen, München (2006 - 2014)
Ergänzung meiner deutschen Gymnasial-Ausbildung durch ein sechsmonatiges ausländisches Highschool-Semester in Montreal (2012)
Bachelor - Elektrotechnik und Informationstechnik — Hochschule München (2014 - 2019)
Master - Elektrotechnik — Hochschule München (2019 - 2021)
Deep Learning, Reinforcement Learning | Tensorflow, Tensorboard, neuronale Netzwerke
Pfad-Planung, Kinematik | ROS | V-REP, URSim
C, Python, Java | PyQt, Java Android Entwicklung | Linux | Latex | Arduino, Raspberry PI
Deutsch (Muttersprache) – Englisch (C1) – Französisch (B2)
Sony Alpha 6300 | Adobe Lightroom, Adobe Photohop, Adobe Premiere
Die Masterarbeit befasst sich mit einer Aufgabe des Ambient Assisted Living (AAL) und wird in dem Labor für Autonome Systeme der Hochschule München durchgeführt.
Lesen Sie mehrDas Team aus zwei weiteren Masterstudenten der Hochschule München (HM) und mir baute einen kostengünstigen Brachiographen (Pen-Plotter) als Projekt für das Masterfach “Mechatronik”.
Lesen Sie mehr






Ich freue mich darauf, von Ihnen zu hören.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}