

Artificial intelligence (AI)
Deep Learning, Reinforcement Learning | Tensorflow, Tensorboard, neural Networks
Overview of my professional experience.
Full time employee in the automotive division of Bertrandt. Working on projects in the field of autonomous driving.
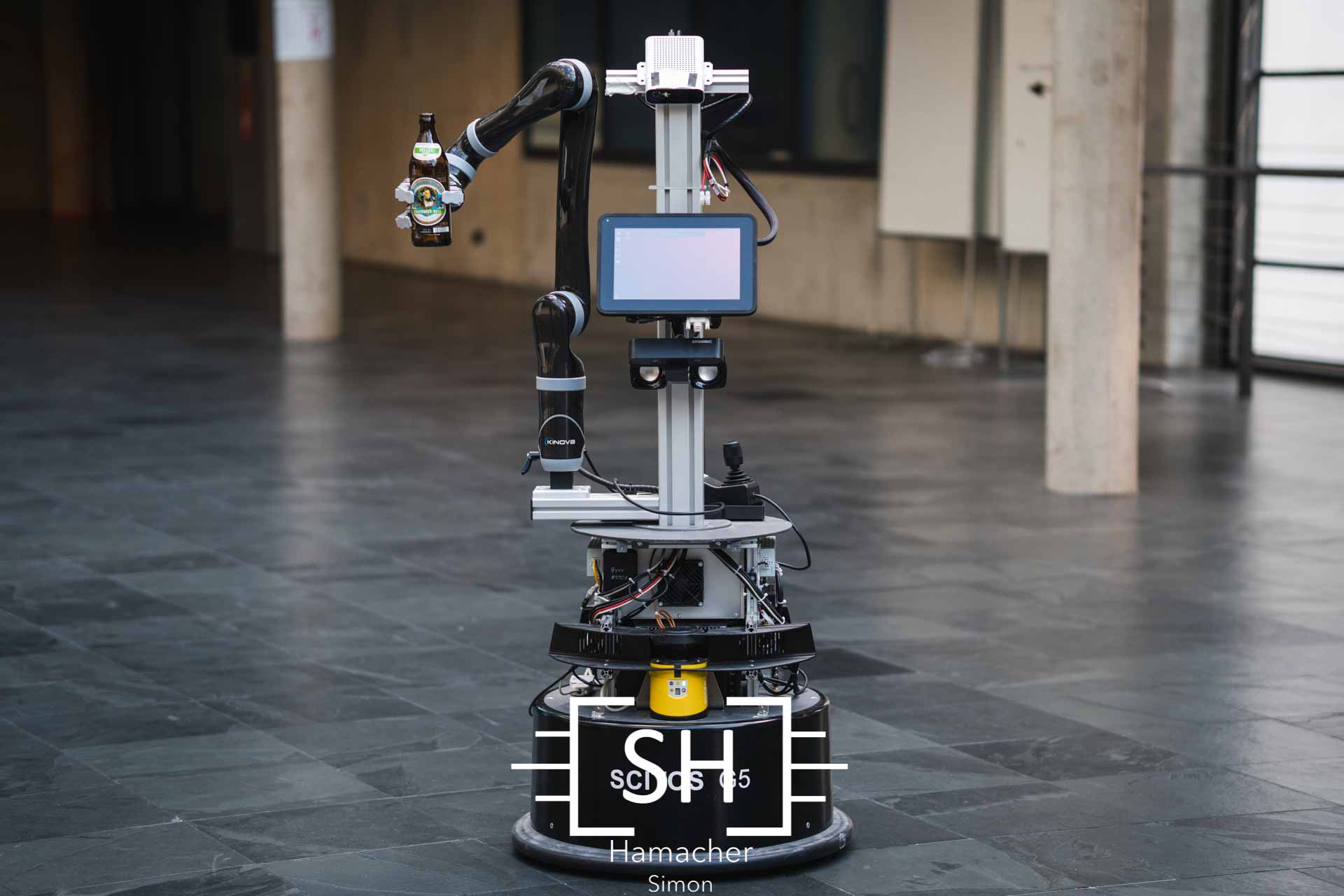
This master thesis deals with the grasping and relocation of objects by a household-assistance robot of the Laboratory for Autonomous Systems of the Munich University of Applied Sciences. This robot consists of the mobile platform Scitos G5 as supplied by the company MetraLabs and a gripper arm of type j2n6s300 as supplied by the company Kinova. This arm provides the typical six degrees of freedom. The aim of this master thesis is to use the sensors of the robot such as depth image camera, to enable the robot to recognize an object, grasp it precisely and place it safely at a specified target position. The robot is controlled by the ROS robot operating system. — Read More…
My second master project consisted of the development and construction of a Brachiograph, a low-cost portable DIN A5 pen plotter. Starting with a photo from an ordinary mobile phone, my Android App transfers this picture through WiFi or Bluetooth to the Brachiograph for contour recognition and plotting. Aspects of this project included programming of a Raspberry PI in Python, creation of the GUI application for the attached touchscreen in PyQt, and finally the precise control of the dedicated 12 channel PWM chip to accurately position the 3-dimensional plotting arms. — Read More…
The essay summarized the benchmark of our own model with the commercial simulation program URSim. Our model, implemented in Python, included both “linear in joint space” trajectories as well as “linear in pose space” trajectories.
My first master project dealt with the improvement of the exploratory robot (Clearpath Husky) provided by the Laboratory for Autonomous systems at the Munich University of Applied Sciences. These improvements included the extension of the 3D model plus the addition of a new IMU allowing better odometry calculations.
My bachelor thesis covers the theory and practical application of a Reinforcement Learning method. Reinforcement Learning is an important aspect of deep machine learning. The thesis shows how to apply those methods while navigating a robotic arm with artificial intelligence safely to the goal. The research was done in the Laboratory for Autonomous Systems of the University of Applied Sciences.
System integration and vehicle testing at the research and innovation center of BMW in Munich — Update of components and firmware of static and dynamic test-vehicles — Test planning including preparation and test result post processing — Implementation and adaptation of the measurement technology to the test vehicles (development of individual adapters, etc.).
Automotive in-vehicle network transceivers – simulation and measurement of complex CAN network topologies with oscilloscope and Spice simulators with specific VHDL modules. Development of a portable high voltage source for better EMC certification.
Graduation - Abitur - Nymphenburger Schulen, Munich (2006 - 2014)
Enrichment of my German Highschool education by a six months foreign Highschool semester in Montreal (2012)
Bachelor of Electrical Engineering and Information Technology — Munich University of Applied Sciences (2014 - 2019)
Master of Electrical Engineering — Munich University of Applied Sciences (2019 - 2021)
Deep Learning, Reinforcement Learning | Tensorflow, Tensorboard, neural Networks
Path Planning, cinematics | ROS | V-REP, URSim
C, Python, Java | PyQt, Java Android development | Linux | Latex | Arduino, Raspberry PI
German (native language) – English (C1) – French (B2)
Sony Alpha 6300 | Adobe Lightroom, Adobe Photohop, Adobe Premiere
The master thesis covers a task of Ambient Assisted Living (AAL) and is conducted in the Laboratory for Autonomous Systems at the Munich University of Applied Sciences (MUAS).
Read moreA Team of three master students including myself from the Munich University of Applied Sciences (MUAS) built a low-cost Brachiograph (pen-plotter) as a project for the master subject “Mechatronics”.
Read more






I am looking forward to hearing from you.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}